
萝卜快跑技术解析:百度在 Apollo Day 2024 上讲了什么?


芝能汽车出品
现在萝卜快跑特别出圈,以至于大家都在看萝卜快跑怎么 “跑” 起来的。
我们可以回溯到 5 月 15 日,百度 Apollo 在武汉举办了 Apollo Day 2024 活动,回顾了自动驾驶领域长达十年的深耕成果,在这次活动上百度发布了 Apollo ADFM(Autonomous Driving Foundation Model),一款专为 L4 级自动驾驶设计的大模型。
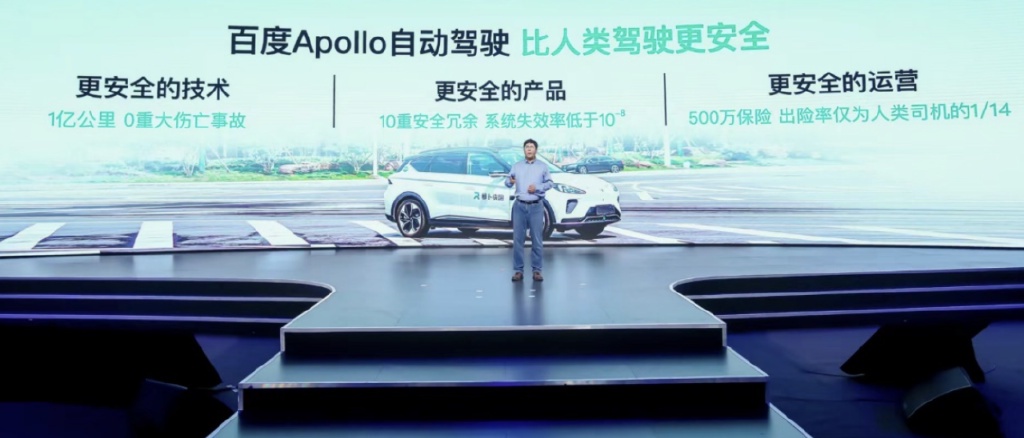
这款大模型结合硬件产品与安全架构,通过多重安全冗余与管理策略,确保了车辆的稳定与可靠。Apollo ADFM 的引入,标志着自动驾驶技术的安全性与泛化性达到了前所未有的高度,其性能超越了人类驾驶员十倍以上,成功覆盖城市级全域复杂场景。

Part 1
第六代无人车:Apollo RT6
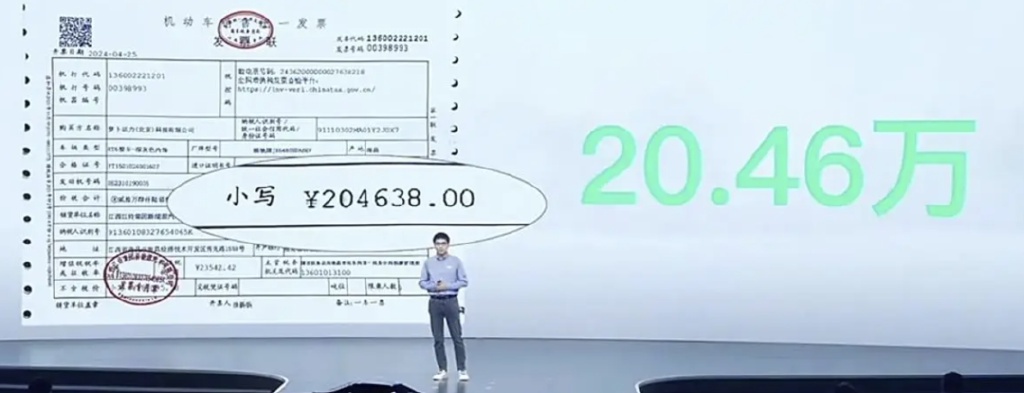
与 Apollo ADFM 一同亮相的还有百度第六代无人车 Apollo RT6(颐驰 06)。这款车型的指导价仅为 20.46 万元,相比前一代车型成本下降了 60%,从近 50 万元大幅降至 20 万元级别,开启了自动驾驶汽车的平民化时代。
Apollo RT6 的推出,不仅体现了技术进步带来的成本降低,还标志着自动驾驶技术向大众市场的迈进。除了大模型的应用,第六代无人车的成本降低还得益于硬件的不断优化与规模化生产。从使用昂贵的 Velodyne 激光雷达到采用成本更低的国产禾赛激光雷达,再到与江铃新能源合作生产,每一步都见证了成本控制与技术迭代的协同进步。
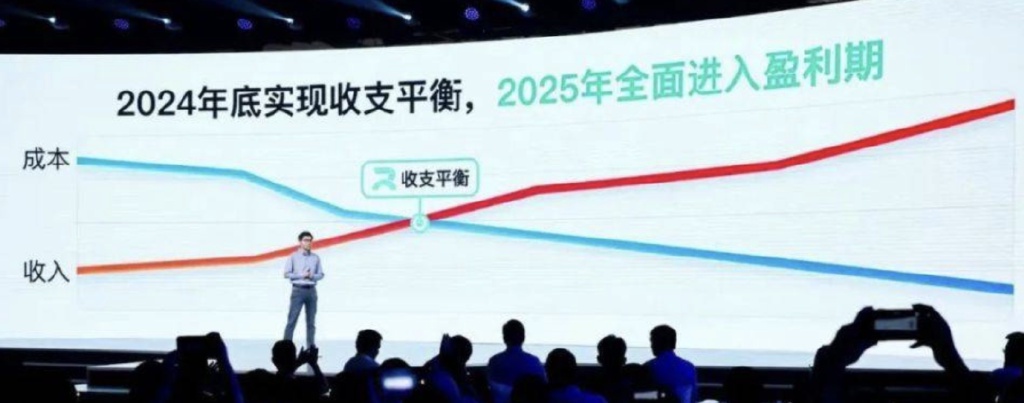
随着萝卜快跑无人车自动运营网络的完善,营运成本将降低 30%,而通过自动驾驶技术与运营效率的持续优化,服务成本将降低 80%。萝卜快跑的收入稳定增长,预计到 2024 年底将在武汉实现收支平衡,2025 年全面进入盈利期,成为全球首个实现商业化盈利的自动驾驶出行服务平台。
百度的认为,Robotaxi 业务需要具备以下几个关键属性:
● 高于人类驾驶员的综合安全性。
● 驾驶合理、体验舒适和及时送达的服务标准。
● 广泛的时空覆盖能力,并能快速扩展到新区域。
● 无人驾驶硬件和服务的低成本。

Part 2 技术底层是什么?
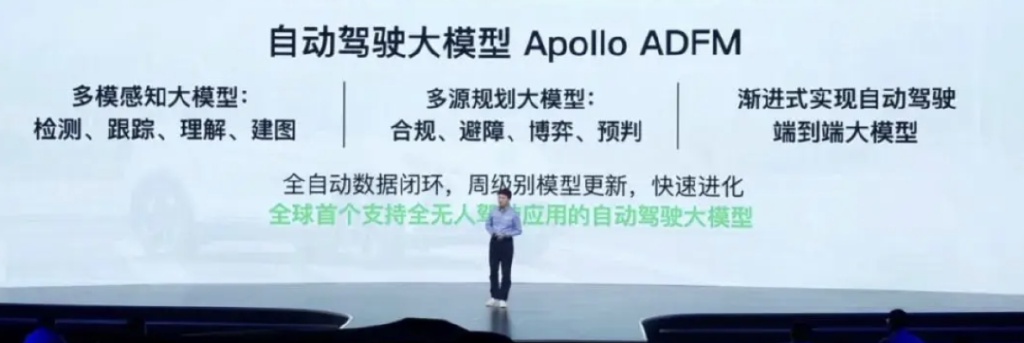
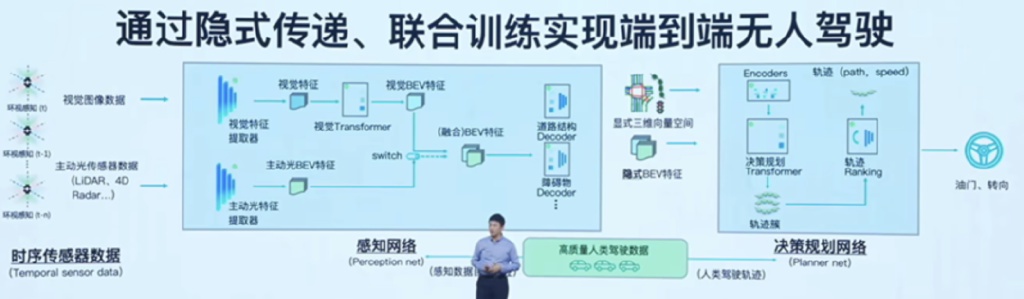
百度的 Autonomous Driving Foundation Model(ADFM),被称为全球首个支持 L4 级别无人驾驶业务的大模型,是萝卜快跑的核心技术。ADFM 包括感知大模型和规划大模型,两者通过联合训练,从原始数据捕捉到油门和转向输出,形成端到端的自动驾驶系统。
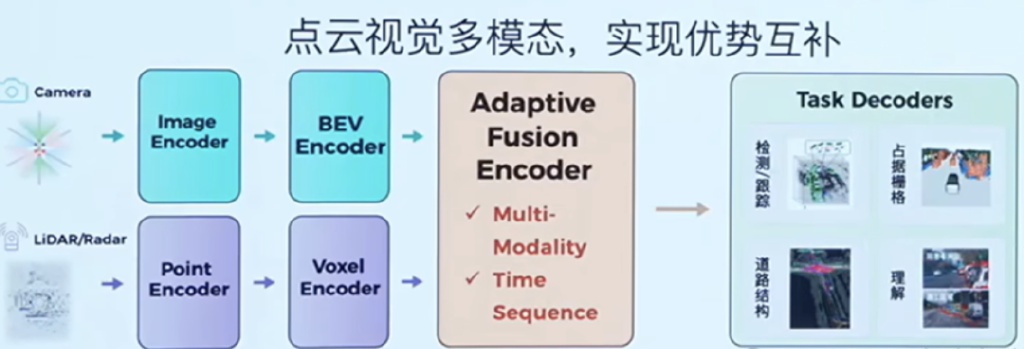
Apollo ADFM 感知大模型已经实现包括检测、跟踪、理解、建图这几项基本能力。其中感知大模型中的基础模型通过点云和视觉多模态融合的方式,实现了相机和主动光不同类型传感器的优势互补,兼顾深度、准确性和信息丰富程度。
在数据处理上,感知大模型也实现了更完善的数据自标注,将原始数据批量自动化转化为粗标数据以及精标数据,极大程度的解决了标注数据获取这一困扰感知效果提升的瓶颈问题。感知大模型对超长尾场景的检测能力更为精准,比如不规则障碍物、各种位置关系的行人、非机动车或是施工占道等等。
● 感知大模型:感知网络从原始传感器数据中提取信息,生成道路结构和障碍物等数据,数据不仅用于模型内部,也以人类可读的形式输出,确保系统的可监督性和问题追溯性。

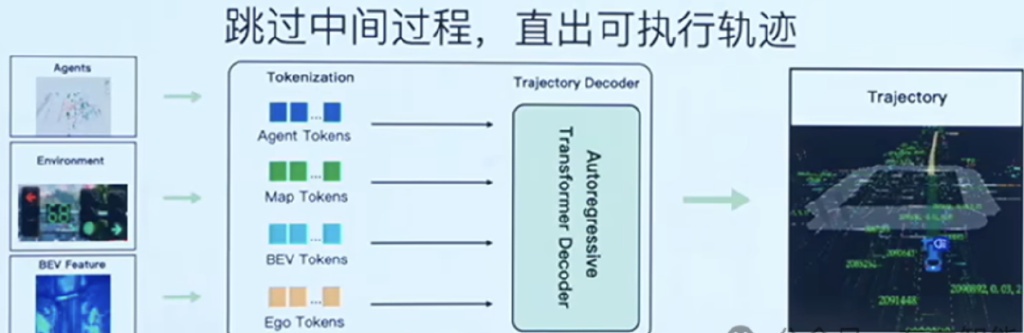
● 规划大模型:决策规划网络接收感知网络输出的数据,包括显示的三维向量空间和隐式的 BEV 特征,通过 Transformer 在大量数据之间挖掘关系,最终形成最佳的轨迹匹配。
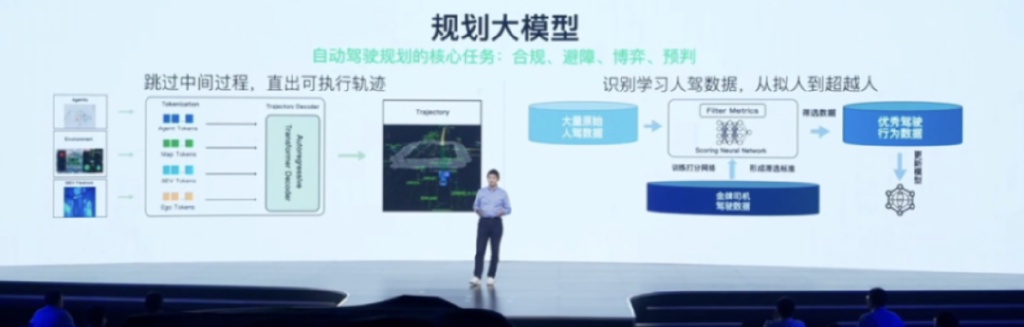
百度采取的 “先分段,再联合训练” 的策略,目的是平衡模型的性能与可解释性,这种方法可能带来更高的准确率和鲁棒性,但也可能因各部分间的协调问题而产生潜在的缺陷。
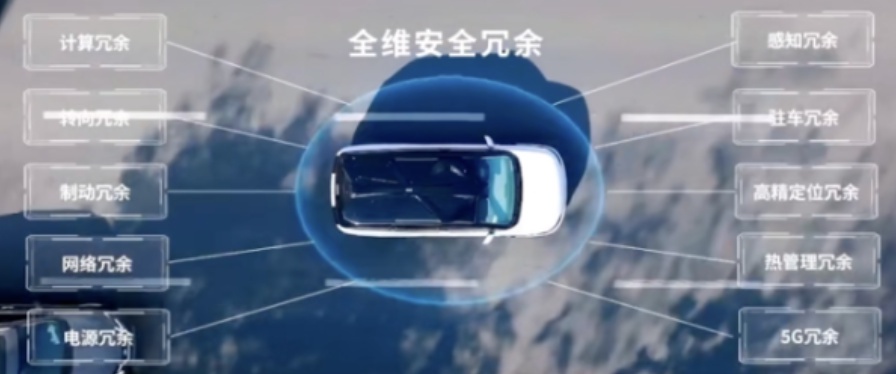
颐驰 06 拥有 1200tops 双 AI 多核芯片、 7 类 40 个传感器, 在感知、计算、高精度定位、转向、制动、驻车、网络、热管理、5G、电源等十个领域的冗余设计全面应用了 “百度 Apollo ADFM 大模型 + 硬件产品 + 安全架构” 的方案。
小结
我们再等子弹飞一会,看看持续上量(突破 1 万、突破 10 万)以后 Robotaxi 的情况会如何。
本文版权归属原作者/机构所有。
当前内容仅代表作者观点,与本平台立场无关。内容仅供投资者参考,亦不构成任何投资建议。如对本平台提供的内容服务有任何疑问或建议,请联系我们。
