

小鹏开始逐步落地端到端🌹
端到端前的自动驾驶方案是 “按规则”,就像驾校教练教侧方停车:距线 30cm 往后倒,后轮压线就右转打死,某轮压线就回正……而端到端就像经验丰富的老司机,见过各种车位和泊车法,早忘了口诀,看到车位凭神经网络 “直觉”,一脚油门就停进去了。同一场景,端到端生效前后差别明显。就像 @XP-何小鹏 在查作业视频里说的,以前的掉头场景能感觉到规则一个接一个切换,而端到端可以像人一样丝滑流畅地掉头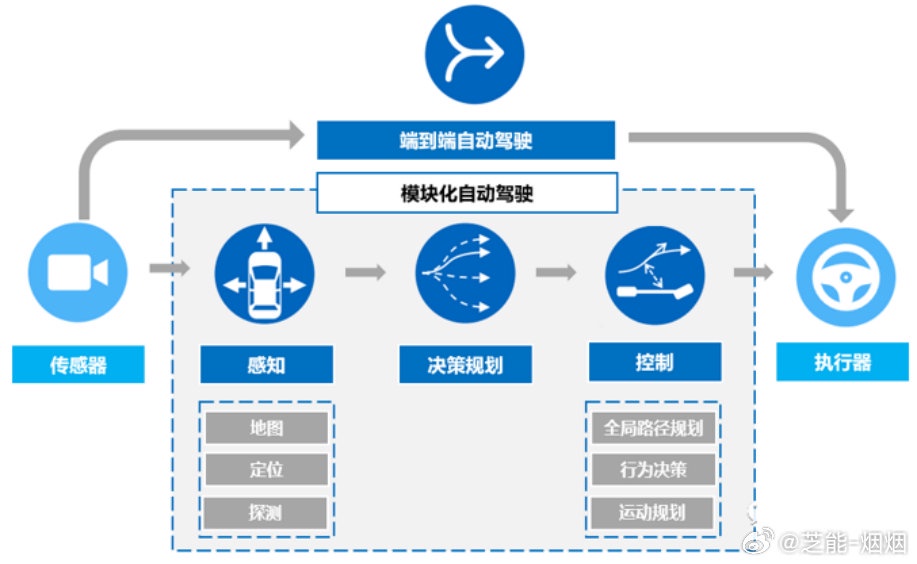
本文版权归属原作者/机构所有。
当前内容仅代表作者观点,与本平台立场无关。内容仅供投资者参考,亦不构成任何投资建议。如对本平台提供的内容服务有任何疑问或建议,请联系我们。
发表你的评论

暂无评论