

技術分析|自動駕駛接管原因


芝能科技出品
隨着蘿蔔快跑和國內汽車企業對智能駕駛的宣傳,自動駕駛成為了一個備受關注的領域,智駕功能路測視頻展示了高度智能化的駕駛技術,吸引了大批消費者和從業者的關注。
自動駕駛技術仍存在許多亟待解決的問題,我們針對自動駕駛接管原因,探討智能駕駛技術的侷限性和挑戰。
01
自動駕駛技術現狀
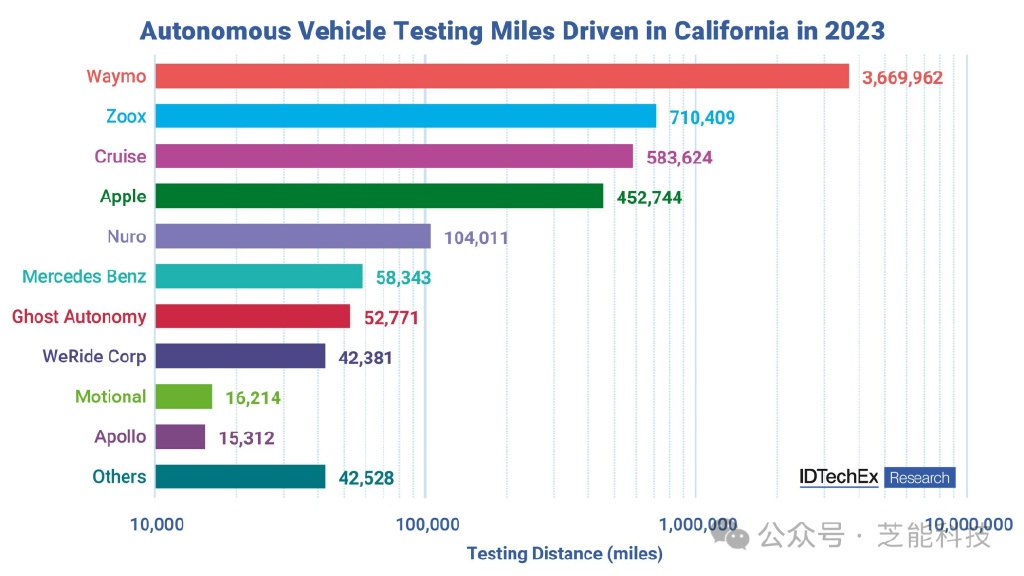
根據美國加州交通管理局(California Department of Motor Vehicles,DMV)的數據,2023 年加州登記的自動駕駛路測車輛總數為 1603 台,在 2022 年和 2021 年分別為 1553 台和 1174 台,自動駕駛路測車輛總數依然呈現增長趨勢。
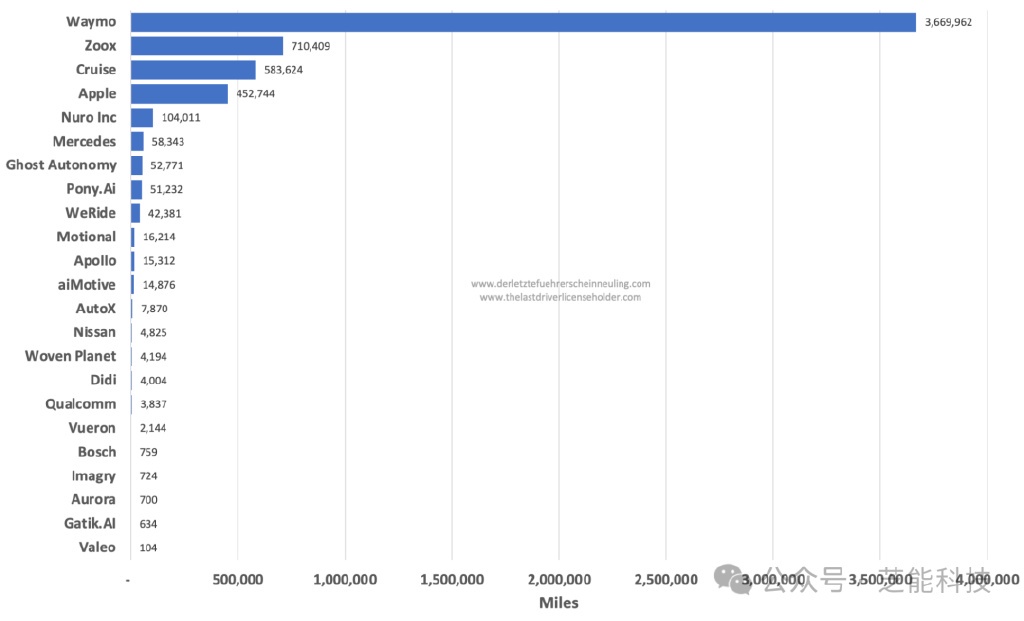
在 2023 年,路測車輛數量最多的前三家公司分別是 Cruise、Waymo 和 Zoox,它們的車輛總數佔據了加州所有自動駕駛路測車輛總數的 80%。2023 年,所有自動駕駛公司的路測車輛在自動駕駛模式下總共行駛了約 926 萬公里,Waymo 在車輛總數不佔優的情況下,佔據了總里程的絕大部分,在北美市場的高覆蓋率和良好的用户體驗。
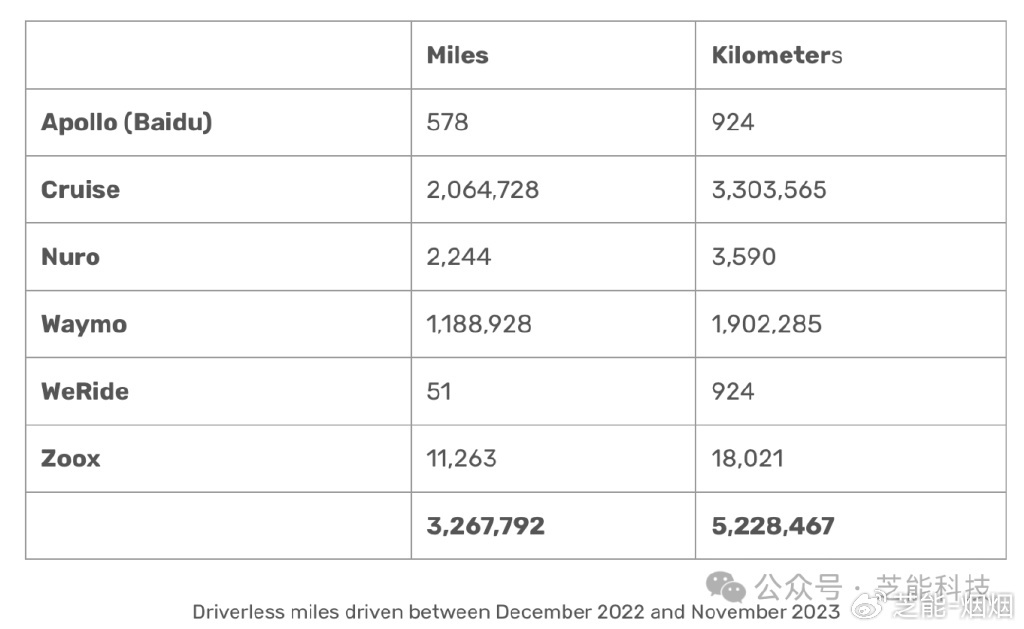
平均接管里程(Miles per Intervention,MPI)是衡量自動駕駛技術成熟度的重要指標。按照馬斯克的觀點,自動駕駛車輛需要比人類駕駛員安全 10 倍,即每行駛 580 萬公里發生 1 起事故。
然而,自動駕駛車輛的 MPI 遠未達到這一標準。2023 年,各自動駕駛公司的 MPI 數據存在較大差異,有些公司實現了零接管,而有些公司則接管頻繁。
02
自動駕駛接管原因分析
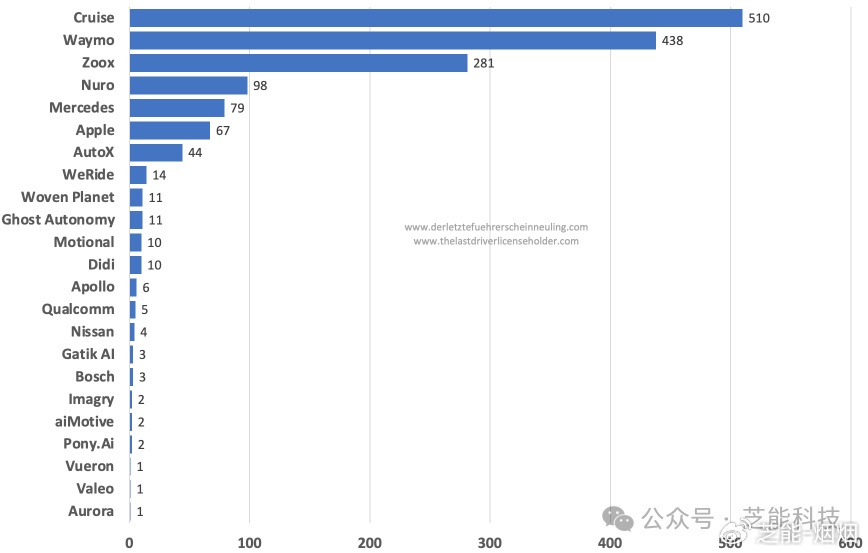
2023 年,所有自動駕駛車輛共發生了 6562 次接管,各公司申報的接管原因多達 305 類。通過對這些接管原因的分類,我們可以更清晰地瞭解自動駕駛技術的瓶頸和挑戰。
● 感知問題
感知問題佔據了接管原因的很大一部分。自動駕駛車輛依賴多種傳感器(如激光雷達、攝像頭、毫米波雷達等)獲取周圍環境的信息。然而,複雜的現實世界場景常常超出這些傳感器的處理能力。例如,光照變化、惡劣天氣、複雜的交通狀況等,都會導致感知系統的誤判和失效。
● 預測問題
預測問題是導致自動駕駛接管的另一大原因。自動駕駛系統需要預測其他交通參與者的行為,並據此規劃自己的行駛路線。然而,行人、車輛等的行為具有高度不確定性,尤其是在城市道路上,行人突然橫穿馬路、車輛突然變道等情況頻發,導致自動駕駛系統難以做出正確的反應。
為了更詳細地瞭解接管原因,我們可以通過具體案例進行分析,這是博世羅列的接管的分析(BOSCH 全年共發生了 314 次接管,而申報的原因種類多達 138 種)
左轉場景
◎ 左轉時,速度過慢 3
◎ 左轉時,自車不合理制動 2
◎ 左轉時,避讓道路行人策略不合理 13
右轉場景
◎ 右轉時,不合理制動或速度過慢 11
◎ 右轉路口為綠燈時,自車不合理減速或不通行 2
十字路口
◎ 十字路口前,交通燈機太晚或過短時間 3
◎ 十字路口不合理制動 2
變道場景
◎ 變道空間尋找過程,速度不穩定、不合理減速或直接卡住了 7
◎ 變道空間足夠,變道場景滿足,自車未能啓動或成功變道 1
◎ 變道空間不足時,自車強行變道 3
◎ 變道軌跡規劃不合理 1
◎ 變道過程中,後方車輛快速接近 1
◎ 變道失敗 1
◎ 變道完成後,自車不合理制動 1
◎ 變道過程中突發偶然接管 1
匯流分流場景
◎ 在後方存在跟隨車輛時,自車從匝道匯入主幹道的速度過慢 1
◎ 出口時, 不合理轉彎及制動 1
◎ 高速公路匯出道路上減速過多 1
◎ 匯流車輛沒有禮讓自車 1
人行橫道
◎ 自車經過人行橫道的時候速度太慢或不合理制動 6
◎ 避讓人行橫道上行人策略不合理 3
不合理制動/轉彎/加速
◎ 正常行駛時產生不合理制動 3
◎ 交通擁堵時突然制動 3
◎ 接近騎行者時,自車頻繁制動 1
◎ 感知到錯誤碰撞風險,自車不合理制動 1
◎ 停放的靜止車輛時不合理制動 1
◎ 高速公路上對靜止車輛發生不合理制動 1
◎ 高速公路行駛時,對立交橋下的車輛與標制動 1
◎ 併線時不合理制動,表現過於謹慎 2
◎ 加速不足 2
◎ 轉向抖動 1
◎ 對向左轉車道車輛直行,導致自車不合理轉彎 1
其他
◎ 縱向跟蹤時車距不穩定導致車切入自車車道,冗員接管 2
◎ 跟隨行駛,行駛速度太慢或自動卡住 2
◎ 感知的不穩定導致車行為猶豫不決 2
◎ 軌跡規劃的軌跡不穩定 2
◎ 路徑規劃提示失敗 2
備註:這些原因分類之後可以仔細評估 Bosch 測試過程中的表現
現代感知技術已經取得了長足進步,但其在複雜環境中的表現仍不盡如人意。傳感器融合、數據處理等方面仍存在許多技術難題,提升感知技術的魯棒性和準確性,仍是自動駕駛領域的一個重要研究方向。現有的預測與決策算法在面對高度動態和不確定的交通環境時,表現仍然不夠穩定。
如何在複雜環境中進行準確的行為預測,並制定出安全可靠的行駛策略,是自動駕駛技術需要攻克的難題之一。自動駕駛技術的廣泛應用還面臨着法規與倫理層面的挑戰。如何制定合理的法規來規範自動駕駛車輛的上路測試和運營,如何解決自動駕駛事故中的責任認定問題,都是需要深入思考和探討的議題。
小結
通過對自動駕駛接管原因的分析,我們可以看出,智能駕駛技術雖然取得了一定的進展,但仍面臨着諸多技術和非技術層面的挑戰。未來,隨着技術的不斷進步和法規的不斷完善,自動駕駛有望在更多場景中實現安全可靠的應用。
本文版權歸屬原作者/機構所有。
當前內容僅代表作者觀點,與本平台立場無關。內容僅供投資者參考,亦不構成任何投資建議。如對本平台提供的內容服務有任何疑問或建議,請聯絡我們。
